RaspberryPi(ラズパイ)でUART通信 セットアップ手順
ラズパイって便利ですよね??
デバイス接続・コントロールできますし、ある程度の制御はできますし!!
今回はデバイスコントロールするにあたり、UART通信をさせてみたいと思います!!
■利用デバイス
今回は下記構成で実施してみました。

USB-Serial変換ケーブルと変換モジュールはこちらを用いました。
【USB-Serial変換ケーブル】
 | ELECOM USBtoシリアルケーブル USBオス-RS-232C用 UC-SGT1 新品価格 |
【変換モジュール】
 | 価格:2,094円 |
変換モジュールの仕様はこちらを参考に。
https://docs.rs-online.com/c74c/0900766b815955b7.pdf
たまたま家にあったのでこちらを利用しました。
(なんであるんだっけ??🤔 昔何かに使った気がするが、、、思い出せんw)
安価なこちらでもOKかと思います!!
 | 新品価格 |
■ラズパイへのpin接続
下記を参考にpin配置を確認
https://shop.lgs.jp/post-519/
・VCC:pin 2
・GND:pin 6
・TXD:pin 14
・RXD:pin 15
■ラズパイ上での設定
まずはラズパイを起動させ、コンソール上で
sudo raspi-config
を入力します。
するとこちらのような画面が表示されるかと思いますので、
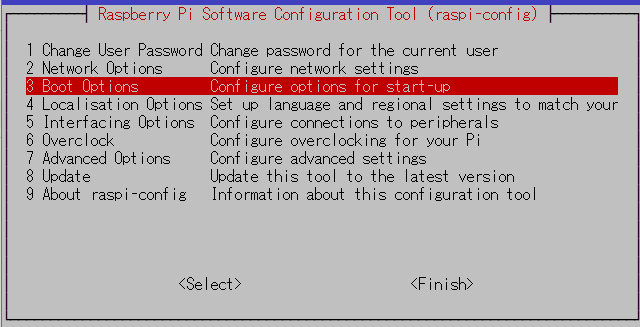
5 Interfacing Options Configure connections to peripherals
を選択します。
するとこちらの画面に遷移するので、
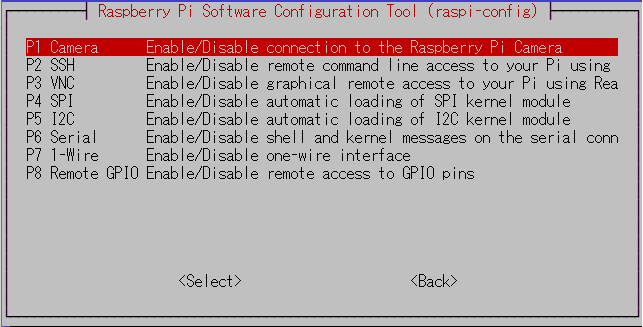
P6 Serial Enable/Disable shell and kernel messages on the serial conn
を選択します。
後は、こちらのSerialを有効にして、Finishすると設定が保存されます。
さらに、/boot/cmdline.txtを下記とする必要があるようです。
※自分はすでに下記設定になっていたので未変更でしたが。
console=tty1 console=serial0,115200 root=/dev/mmcblk0p7 rootfstype=ext4 elevator=deadline fsck.repair=yes rootwait
■PC側設定
ラズパイとのUART通信を行うにあたり、
Tera Term
を用いました。
こちらからイントーラーがダウンロードできますので、ダウンロードしてmsiを実行すればインストール完了です。
「Tera Term」定番のターミナルエミュレーター - 窓の杜
Tera Termを実行してボーレートを115200に変更します。
変更手順は、
上タブの設定 ⇒ シリアルポートを選択すると、

が表示されるので、スピードを115200に設定を変更します。
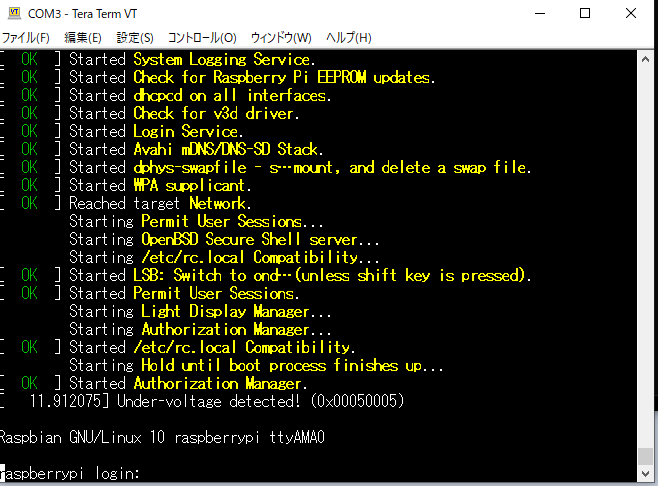
■動作確認
設定完了したので、動かしてみます。
配線を確認して、ラズパイ電源ON!!
Tera Term上でログが確認できればOKです。